目前主要的网络模型有,深度神经网络(DNN)、卷积网络(CNN)、循环神经网络(RNN)。现在深度神经网络都是几乎都是卷积、循环两种模型的延伸。
寻找最优值
计算机是如何实现这些应用的呢?其实对于计算机来说,任何的问题都是数学问题,解决问题的方法就是所使用的算法,而解决问题的过程实质都是寻找最优值的过程。
分类分析
比如说给机器一大堆肿瘤CT照片,哪一个是良性,哪一个是恶性,都给标注清楚,然后再给机器一张新的未标注的肿瘤照片,让机器来判别这个肿瘤是良性还是恶性,这种就叫分类分析,它的本质其实也是画一条线,把良性和恶行给分开。
?> 提示:其实利用梯度下降算法来训练这个参数,非常类似于人的学习和认知过程,所谓的同化和顺应,吃一堑长一智,这就和机器学习的过程是一模一样的。
图片通道数等于1,表示黑白图片,颜色上只有一个维度;通道数等于3,表示彩色图片(RGB),颜色上有三个维度;通道数等于4,表示在彩色图片(RGB)上加一个透明度(A),颜色上有三个维度加一个透明维度。
图像识别
例如,在5X5的表格中,写上一个 X 字母,这对我们来说是一副图像,我们可以很轻易的认出图像中的字母,但是在计算机看来就是一大堆数,每一个格子要么黑的,要么白的,比如黑格为1,白格为0,它所代表的就是一共 、...一直到 ,一共25个输入端,每个输入端输入0或1,输入完了之后,通过一系列的训练过程,计算机就能找到一大堆参数来判断它是不是一个 X 字母。
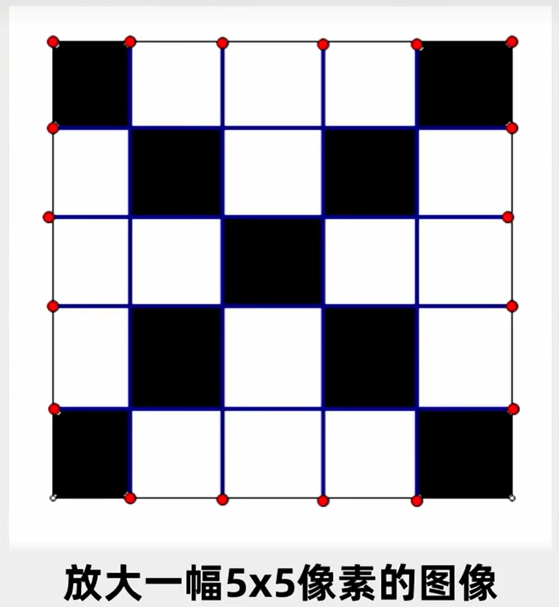
?> 提示:这里幅画只有黑白两种颜色,因此我们可以用0或1来表示颜色;如果图像是灰度图,我们就可以用0~255的一个灰度值来表示颜色;如果图像是彩色图,我们就可以用RGB三个颜色,三组0~255的一个值来表示颜色。所以不管是什么图,最后都能换成一大堆的数字,我就能把这一大堆数字,放入神经元中进行训练参数,最后找到一个误差最小的函数,这就是一个成功的训练,从此以后,我利用这个参数就能判断这个图案的形状。如果只想判断这幅图是不是 X 字母,那也许一层神经元就够了。
生成数据集
生成数据集:产生批量的真实数据。
python
import random
import torch
def synthetic_data(w, b, num_example):
"""构造一个人造数据集,生成y = wx + b + 噪声"""
# 生成均值为0,标准差为1的随机数,num_example行数,w列数
x = torch.normal(0, 1, size=(num_example, len(w)))
# y函数
y = torch.matmul(x, w) + b
# 加上噪声,均值为0,标准差为0.01,形状和y相同
y += torch.normal(0, 0.01, y.shape)
# 返回x和y的拍平
return x, y.reshape((-1, 1))
# 真实的w、b
true_w = torch.tensor([2, -3.4])
true_b = 4.2
# 生成特征、标注
features, labels = synthetic_data(true_w, true_b, 1000)读取小批量
读取小批量:定义一个 data_iter 函数,该函数接收批量大小、特征矩阵和标签向量作为输入,生成大小为 batch_size 的小批量。
python
# batch_size批量大小, features特征, labels标注
def data_iter(batch_size, features, labels):
# 样本数量
num_examples = len(features)
# 生成序号
indices = list(range(num_examples))
# 打乱标号,这些样本是随机读取的,没有特定的顺序
random.shuffle(indices)
# 随机抽取样本
for i in range(0, num_examples, batch_size):
batch_indices = indices[i: min(i + batch_size, num_examples)]
# 返回随机样本的特征、标注
yield features[batch_indices], labels[batch_indices]
batch_size = 10
for x, y in data_iter(batch_size, features, labels):
print(x, '\n', y)
break初始化参数
初始化参数:初始化模型参数。
python
# 随机初始化为均值0,方差为0.01(正太分布),输入维度是2,因此size=(2, 1)
w = torch.normal(0, 0.01, size=(2, 1), requires_grad=True)
# 偏差(标量),因为要更新,所以requires_grad=True
b = torch.zeros(1, requires_grad=True)定义模型
定义模型:定义模型函数。
python
def linreg(x, w, b):
"""线性回归模型"""
return torch.matmul(x, w) + b定义损失
定义损失:定义损失函数。
python
def squared_loss(y_hat, y):
"""均方损失"""
return (y_hat - y.reshape(y_hat.shape)) ** 2 / 2定义优化
定义优化:定义优化算法。
python
# params参数里面包含w、b,lr学习率,batach_size批量大小
def sgd(params, lr, batch_size):
"""小批量随机梯度下降"""
# 更新的时候不需要计算梯度
with torch.no_grad():
for param in params:
# 学习率减去梯度再求均值
param -= lr * param.grad / batch_size
# 梯度置零
param.grad.zero_()训练函数
训练函数:设计训练函数。
python
# 学习率
lr = 0.03
# 训练轮数(一次完整的训练就是一个epoch)
num_epochs = 3
# 线性模型
net = linreg
# 损失函数
loss = squared_loss
# 每次训练都是两层
for epoch in range(num_epochs):
# 第一层(扫描一遍数据,每次拿出一个批量大小的x,y)
for x, y in data_iter(batch_size, features, labels):
# 把x, w, b放进net线性模型中进行计算得到预测的y,再和真实的y做损失
l = loss(net(x, w, b), y)
# 损失l就是一个长为批量大小的向量,进行求和,再求导(算梯度)
l.sum().backward()
# 算完梯度后,使用sgd对w, b参数更新
sgd([w, b], lr, batch_size)
# 第二层(数据扫描完一次之后,评价一下我们的进度,这块不需要计算梯度)
with torch.no_grad():
# 整个的features数据传进模型,计算值和真实的labels进行比较
train_l = loss(net(features, w, b), labels)
print(f'epoch {epoch + 1}, loss {float(train_l.mean()):f}')
# 比较真实参数和通过训练学到的参数来评估训练的成功程度
print(f'w的估计误差:{true_w - w.reshape(true_w.shape)}')
print(f'b的估计误差:{true_b - b}')
'''
输出:
epoch 1, loss 0.035855
epoch 2, loss 0.000131
epoch 3, loss 0.000048
w的估计误差:tensor([ 0.0003, -0.0011], grad_fn=<SubBackward0>)
b的估计误差:tensor([0.0007], grad_fn=<RsubBackward1>)
'''简洁实现
这里我们先安装一个d2l包,下面会用到,安装命令如下:
pip install --user d2l通过使用深度学习框架来简洁地实现线性回归模型。
python
# 导入torch的模具
from d2l import torch as d2l
import torch
# 导入nn神经网络、optim优化器
from torch import nn, optim
# 导入data数据类
from torch.utils import data
'''读取数据集,将数据集导入加载器'''
# 真实的w、b值
true_w = torch.tensor([2, -3.14])
true_b = 4.2
# 生成整个数据集
features, labels = d2l.synthetic_data(true_w, true_b, 1000)
# 通过TensorDataset将data_array打包为一个dataset
data_set = data.TensorDataset(*(features, labels))
# 通过DataLoader将dataset顺序shuffle随机打乱,再分为多个批量大小为batch_size的样本,返回一个PyTorch数据迭代器
data_iter = data.DataLoader(data_set, batch_size=10, shuffle=True)
'''定义模型线性层'''
# 使用框架定义好的Linear线性层,输入是2(输入的二维张量的大小[batch_size, 2]),输出是1(输出的二维张量的大小[batch_size, 1],也表示全连接层的神经元个数,单层神经网络),最后放到Sequential容器里
model = nn.Sequential(nn.Linear(2, 1))
# 初始化模型w参数,通过下标0访问到Linear线性层,.weight斜率w,.data真实数据,.normal_正太分布
model[0].weight.data.normal_(0, 0.01)
# 初始化模型b参数,通过下标0访问到Linear线性层,.bias偏差b,.data真实数据,.fill_填充数据
model[0].bias.data.fill_(0)
'''定义优化器'''
# SGD随机梯度下降,net.parameters()模型参数,lr学习率
optimizer = optim.SGD(net.parameters(), lr=0.03)
'''定义损失函数'''
# 均方误差是一个常用的误差,在框架里已经自定义好了MSELoss类,也称平方L2范数
loss_function = nn.MSELoss()
'''开始3轮训练'''
num_epochs = 3
for epoch in range(num_epochs):
# 每一次选择一个批量来计算梯度
for x, y in data_iter:
# 梯度清零(不清零,PyTorch会累加梯度)
optimizer.zero_grad()
# 计算损失,model自己本身带了模型参数w,b,因此只需传递x
loss = loss_function(model(x), y)
# 这里PyTorch已经做了sum()操作了,backward()反向传播
loss.backward()
# step()更新模型参数
optimizer.step()
# 调用整个features数据和labels标注,对模型损失计算
l = loss_function(model(features), labels)
print(f'epoch {epoch + 1}, loss {l:f}')
'''
输出:
epoch 1, loss 0.000261
epoch 2, loss 0.000102
epoch 3, loss 0.000101
'''模型训练
深度学习的核心总结起来就四个字“模型训练”。
在第一轮完整的训练结束后,会生成一个模型,由于模型只训练了一轮,因此模型的预测精度并不会很高。为了提高模型精度,我们会继续使用该模型进行第二轮、第三轮...的训练,每一轮完整的训练就称为一个“epoch”。通常每个 epoch 后都会生成一个模型,如果当前模型的预测精度高于之前模型的预测精度,则舍弃之前的模型,反之则保留当前模型以供下一轮训练使用。因此,我们最终会得到两个模型,一个是预测精度最高的模型(最适合使用的模型),另一个是最后一轮训练后得到的模型。
你的说法总体上是正确的,但有一些细节可以补充和澄清:
训练过程中的模型生成:
- 在每个 epoch 之后,模型的参数都会更新,因此在每个 epoch 后都会有一个新的模型版本。
- 这些模型版本通常在训练过程中会被保存,以便后续可以进行评估和比较。
模型的保存和选择:
- 保存最佳模型:在实际训练过程中,通常会保存表现最好的模型,即在验证集上表现最优的模型。这是因为模型的最终表现不仅取决于训练集上的表现,还需要考虑验证集上的表现,以避免过拟合。
- 更新和比较:在每个 epoch 后,通常会使用验证集评估当前模型的表现。如果当前模型在验证集上的表现优于之前保存的最佳模型,就更新保存的最佳模型。
- 最终模型:训练结束后,通常会使用在验证集上表现最好的模型作为最终模型,这个模型可能不是最后一个 epoch 的模型,而是在训练过程中所有 epoch 中表现最好的模型。
最终得到的模型:
- 最佳模型:是指在训练过程中,验证集上表现最好的模型(即预测精度最高的模型)。
- 最后一个 epoch 的模型:是指训练完成后的最终模型版本,它可能不是最优的模型,因为它未必在验证集上表现最佳。
总结来说,训练过程中会保存多个模型版本,通常会选择在验证集上表现最佳的模型作为最终模型,以保证模型在实际应用中的效果最佳。最后一个 epoch 的模型不一定是最优的,选择标准应基于验证集上的表现。
在深度学习的过程中,每个 epoch 结束后并不会自动生成一个模型文件。实际上,训练过程中模型的参数会在每个 epoch 完成时更新,但是否生成模型文件取决于开发者的设置。
通常,开发者会在训练代码中显式指定在某些条件下保存模型,例如:
- 每个 epoch 后保存模型:有时开发者会选择在每个 epoch 完成后保存一个模型文件。
- 验证集表现最佳时保存模型:更常见的做法是在训练过程中使用验证集评估模型表现,只有当模型在验证集上的性能优于之前的模型时才保存该模型。
- 周期性保存模型:有时为了防止训练中途出错或中断,开发者会设置定期保存模型,可能是每几个 epoch 或固定的时间间隔。
因此,严格来说,“在第一轮完整训练(一个 epoch)结束后,会生成一个模型”的说法不完全正确,是否保存模型取决于开发者的配置和具体实现。如果没有指定保存条件,模型只是经过更新,而不会自动生成可保存的文件。
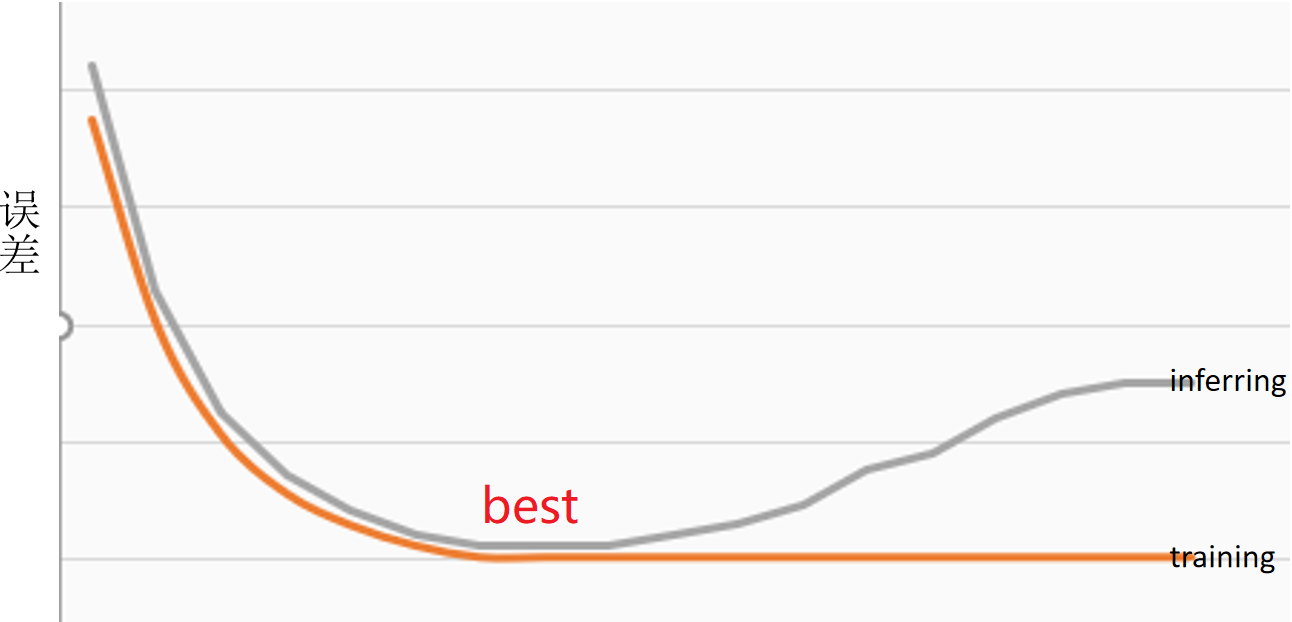
其训练与推理准确度关系大致分步如下图:当训练(Training)和推理(Inferring)最相近时,我们就认为这是最适合使用的模型。